DONGGUAN, CN / ACCESS Newswire / April 23, 2026 / A humanoid robot is not a single machine. It is a collection of joints that must behave like one.
As designs like Fauna Robotics continue to push toward higher degrees of freedom, the number of joint motors increases rapidly. What used to be a system with a dozen actuators is now evolving into architectures built around 20, 30, or even more independently controlled joints.
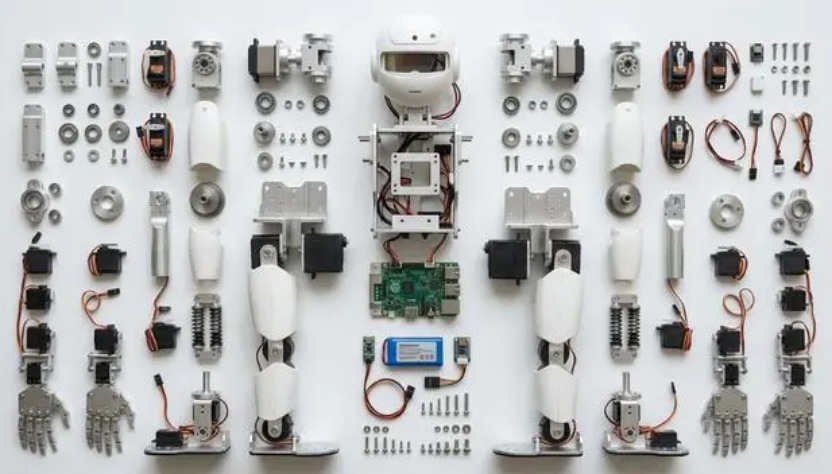
At that scale, joint motors stop being simple components. They become the foundation of the entire system.
Each joint needs to do more than generate motion. It must hold position, respond to commands with minimal delay, and maintain consistency over time. This is why servo-based joint motors are widely used in humanoid robotics. By integrating actuation, reduction, and control, servos allow each joint to be treated as a directly controllable unit.

But in practice, selecting a joint motor is only part of the problem.
Different joints behave differently. Upper body joints prioritize speed and responsiveness for interaction, while lower body joints require higher torque and stability to support load and balance. When these joints operate together, mismatched behavior can quickly affect the overall motion.
From Kpower‘s experience in multi-joint systems, the real challenge lies in coordination. Dozens of servos must respond under a shared timing logic, maintain alignment over repeated cycles, and avoid cumulative error during continuous operation.

This is where system-level design becomes critical.
Kpower has been focusing on integrated drive-control solutions that combine motor, transmission, and control into compact modules, reducing external dependencies and improving consistency. At the same time, bus-based communication enables multiple joints to operate within a unified framework, which is essential as joint count scales.
As humanoid robots move toward real applications, motion quality becomes more visible. Smoothness, stability, and predictability are no longer technical metrics-they define how the robot is experienced.

Understanding joint motors, therefore, is not just about choosing the right component. It is about building a system where every joint works together as one.
Company Information
Company: kpower servo
Contact Person: garson
Email: info@kpower.com
Website: https://www.kpower.com/
SOURCE: Kpower Servo
View the original press release on ACCESS Newswire

